Cálculo de matrices
Términos y definiciones
Como matriz se denomina un sistema de elementos aij, que están dispuestos en un esquema rectangular de 2 dimensiones. El esquema de m filas y n columnas se denomina matriz (m, n) o matriz m x n. La posición de un elemento dentro de la matriz se caracteriza por dos subíndices. El primer índice es el número de fila y el segundo es el número de columna. La numeración comienza en la parte superior izquierda de la matriz y va de izquierda a derecha y de arriba a abajo. Si para una matriz es n = m entonces la matriz se llama matriz cuadrada.
Diagonal principal
Los elementos de la matriz para los subíndices i = j son los elementos de la diagonal principal. Los elementos de la parte inferior izquierda a la superior derecha se denominan diagonal secundaria.
Aquí los principales elementos diagonales se muestran en color rojo:
y los elementos diagonales secundarios en color verde:
Matriz de unidades
La matriz en la que todos los elementos de la diagonal principal son iguales a 1 y todos los demás elementos son iguales a 0 significa matriz unitaria E.
Matriz transpuesta
La matriz reflejada en la diagonal principal se llama matriz transpuesta. Para una matriz A = (aij) la matriz transpuesta AT = (aji). La transpuesta de una matriz transpuesta es la propia matriz A = (AT)T.
Determinante
A cada matriz cuadrada se le puede asignar un número único, que se llama determinante (det(A)) de la matriz. En general, el determinante de una matriz NxN se define mediante la fórmula de Leibniz:
aquí la suma debe extenderse sobre todas las permutaciones σ. Así, a partir de los elementos de A, se forman todos los productos posibles para cada n-elemento de forma que cada uno de los productos de cada fila y columna contenga exactamente un elemento. Estos productos se suman y la suma es el determinante de A. El signo de los sumandos es positivo para las permutaciones pares y negativo para las impares.
Matriz inversa
La matriz inversa A-1 se define por la siguiente ecuación
Las matrices para las que existe una inversa se denominan matrices regulares. Las matrices que no tienen inversa se denominan matrices singulares.
Para la matriz inversa, son válidas las siguientes reglas de cálculo:
El cálculo de la matriz inversa A-1 se realiza mediante el algoritmo de Gauss-Jordan o con los adjuntos. El método de Gauss-Jordan transforma la matriz (A | E) en la forma (E | A-1) de la que se puede leer directamente la inversa. Con los adjuntos y el determinante, la inversa se puede calcular directamente como
Clases de matrices
Una matriz cuadrada A se llama matriz simétrica si y sólo si AT = A y se aplica una matriz antisimétrica si AT = A. Una matriz ortogonal si y sólo si AT = A-1
Matriz Adjunta
El adjunto de la matriz A se calcula de forma que para cada elemento de la matriz aij se establece un subdeterminante con la eliminación de la línea i y la columna j. El valor de este determinante se multiplica por (-1)i+j que da el elemento i,j de la matriz adjunta.
Reglas de cálculo para las matrices
La multiplicación de la matriz es asociativa:
La multiplicación de matrices y la suma de matrices son distributivas:
Para la suma y la multiplicación por números reales λ, μ:
y:
Hay matrices divisoras de cero A ≠ 0 y B ≠ 0 se aplica a
Para las matrices cuadradas es:
Suma de matrices
La suma de dos matrices A y B se realiza sumando los elementos de las matrices. C = A + B con ci, j = ai, j + b i, j
Calculadora para la suma de dos matrices:
|
+ |
|
|
= |
|
Una calculadora general para la suma de matrices NxM está aquí: Sumar y restar matrices
Sustracción de matrices
La resta de dos matrices A y B se realiza restando los elementos de las matrices. C = A - B con ci,j= ai,j - bi,j
Calculadora para la sustracción de dos matrices:
|
- |
|
|
= |
|
Una calculadora general para la sustracción de matrices NxM está aquí: Sumar y restar matrices
Multiplicación de la matriz por un escalar
La multiplicación de una matriz por un escalar se realiza multiplicando cada una de ellas por los elementos de la matriz escalar. a * B = a * bi,j
Multiplicación de matrices
La multiplicación de dos matrices A y B requiere que el número de columnas de la primera matriz sea igual al número de filas de la segunda. El producto obtenido al multiplicar los elementos de la fila y la columna se suma. Para el primer elemento de la matriz resultante, se multiplican los elementos de la primera fila de la primera matriz por los elementos de la primera columna de la segunda matriz y se suman. Para los demás elementos se hace lo mismo con las demás filas y columnas.
Una calculadora general para la multiplicación de matrices NxM está aquí: Matriz producto
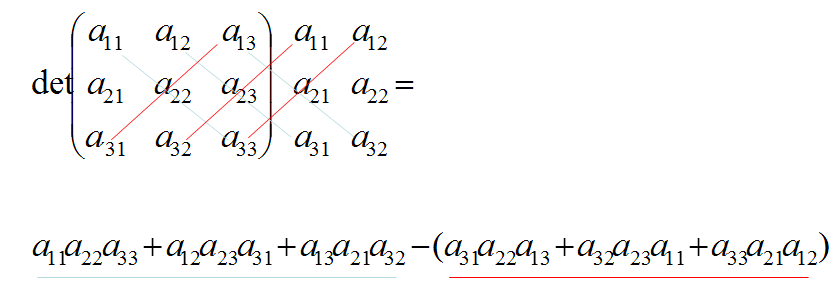
Regla de Sarrus
El determinante de una matriz cuadrada de 3x3 se calcula según la regla de Sarrus restando la suma de los productos de la diagonal principal de la suma de los productos de la diagonal secundaria.
Un solucionador general de determinantes está aquí: Determinante NxN
Cálculo de la inversa por Gauss-Jordan
Se busca la matriz inversa A-1 a la matriz A. Para ello, primero con la matriz identidad, se forma la matriz E (A | E). Mediante transformaciones adecuadas conseguimos formar la (E | A-1). A continuación se pueden realizar los pasos de un ejemplo.
Enfoque de Gauss-Jordan
Transformaciones para obtener la siguiente forma.
Calculadora de la matriz inversa: Matriz inversa-NxN
Calculation of the adjugate matrix
El adjunto de la matriz A se calcula de forma que para cada elemento de la matriz aij se establece un subdeterminante con la eliminación de la línea i y la columna j. El valor de este determinante se multiplica por (-1)i+j que da el elemento i,j de la matriz adjunta.
El resultado es la matriz adjunta.
Calculadora de la matriz adjunta: Matriz adjunta-NxN
Multiplicación de un vector con una matriz
El producto de una matriz por un vector es una imagen lineal. La multiplicación se explica si el número de columnas de la matriz es igual al número de elementos del vector. El resultado es un vector cuyo número de componentes es igual al número de filas de la matriz. Esto significa que una matriz con 2 filas siempre mapea un vector a un vector con dos componentes.
Calculadora del producto matriz-vectorial: Matriz vector producto
Cálculo de valores propios
La ecuación
puede transformarse en el sistema de ecuaciones homogéneas
El sistema de ecuaciones tiene una solución no trivial si y sólo si el determinante desaparece. Que si es aplicable
El polinomio se llama polinomio característico de A y la ecuación es la ecuación característica de A. Si λi es un valor propio de A entonces las soluciones de la ecuación característica son los vectores propios de A al valor propio λi.
Calculadora de valores propios: Eigenvalues
Más calculadoras
Calculadoras:
Contenido Matriz producto Sumar y restar matrices Matriz-vector producto Matriz inversa Factorización QR Trigonometría calculadora Trigonometría tabla